UC Berkeley · Prof. Mark W. Mueller · Sep 2024 – May 2025
UAV PATH PLANNING
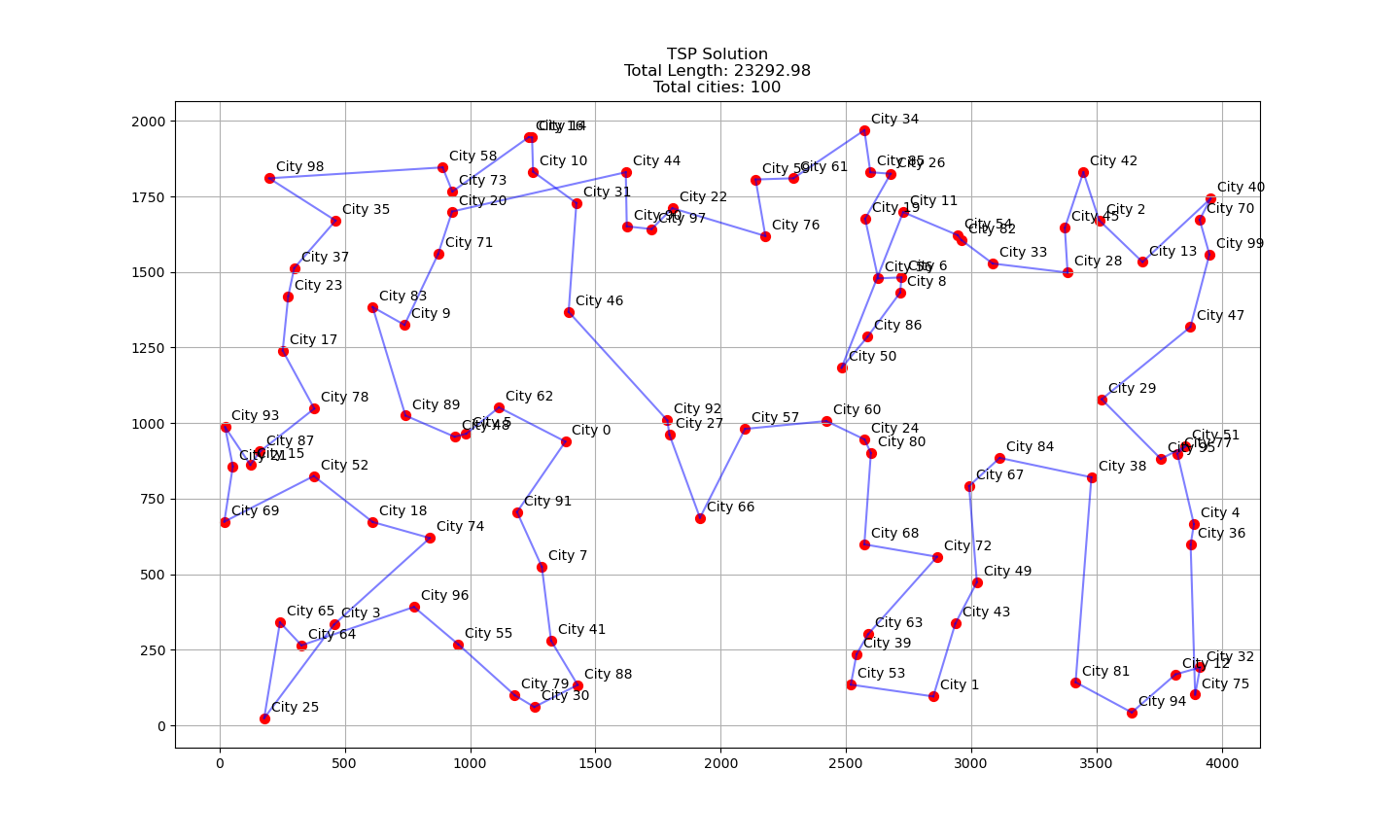
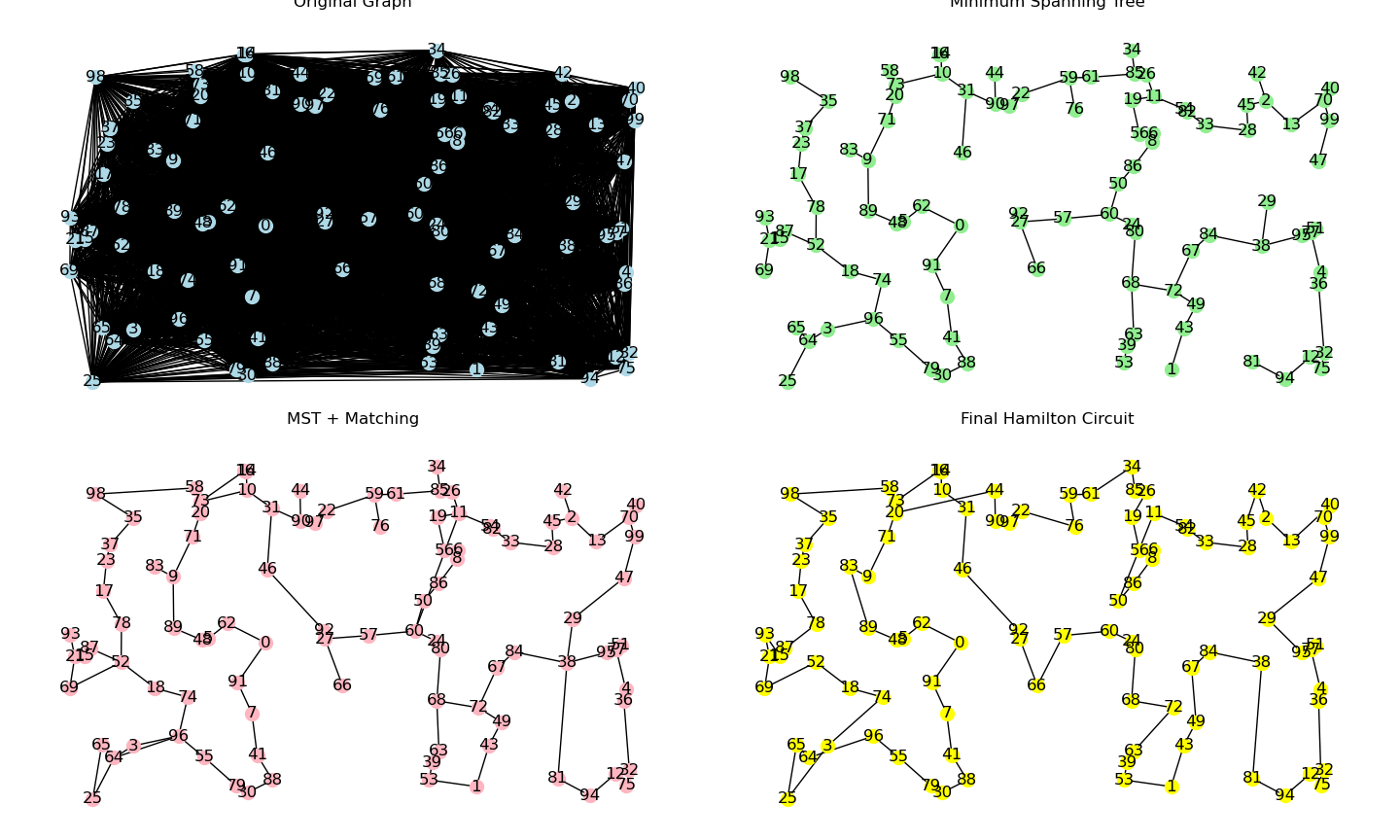
PATH PLANNING
Implementation of DARP and MST algorithms for optimal route planning.
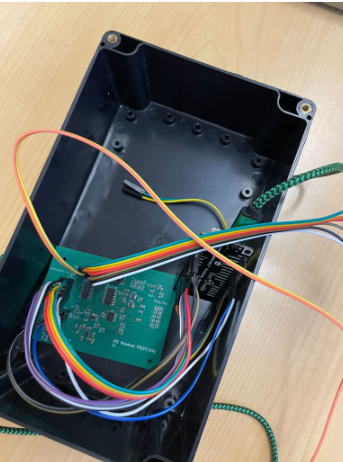
DATA TRANSMISSION & SENSORS
Testing ESP32 transmitter with simulated signals and implementing soil sensors for agricultural monitoring.

AUTONOMOUS SYSTEM
Integration of sensor data with decision-making algorithms.